Explorando el fondo marino sin dañarlo
Explorando el fondo marino sin dañarlo
Hay una gran parte de los organismos marinos de las profundidades cuya manipulación puede llegar a ser muy complicada. Los vehículos especiales operados a distancia (ROV) se construyen para este propósito, pero algunos pueden ser una amenaza para las criaturas marinas extremadamente frágiles.
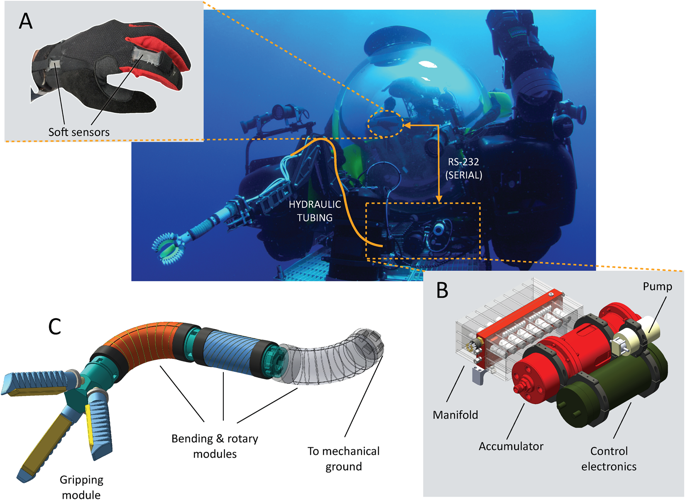
Los científicos del Instituto Wyss, la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson de Harvard (SEAS), el Colegio Baruch y el Instituto de Estudios Avanzados Radcliffe han resuelto este problema con una pinza robótica que es suave y flexible. Con ella es más fácil tomar muestras de la vida del océano sin comprometerla. El brazo robótico modular está equipado con sensores, puede moverse con flexibilidad y delicadeza para agarrar y manipular a las criaturas delicadas.
El brazo robótico, está formado por módulos de flexión, giro y agarre que pueden configurarse de acuerdo con los requisitos de movimiento. El sistema también tiene un mecanismo de control hidráulico compacto, que permite su despliegue en entornos remotos y hostiles.
El sistema es eficiente en términos energéticos y es ideal para ser utilizado junto con vehículos submarinos tripulados. El brazo se puede operar de forma remota mediante un guante capaz de controlar la articulación de muñeca y pinzas. Además, utilizando diferentes tipos de pinzas blandas; los científicos pueden interactuar y examinar a las criaturas sin dañarlas.
Este innovador sistema robótico de brazo y pinzas se probó en los ecosistemas de aguas profundas del archipiélago de Fernando de Noronha en Brasil; donde los científicos no tuvieron problemas para recolectar todo tipo de organismos. Ahora, trabajan para añadir más características a este sistema como capacidades de muestreo de ADN y ARN no invasivas dentro de las unidades de accionamiento del brazo de control. Su objetivo es capturar las frágiles criaturas marinas, realizar experimentos bajo el agua y liberarlos sin ningún daño.