En La Plata crean robots para “tareas peligrosas”
En La Plata crean robots para “tareas peligrosas”
Trabajarían en actividades que suponen alto riesgo para los humanos.
Distintos equipos conformados por alumnos de la facultad de Informática de la Universidad Nacional de La Plata desarrollan sistemas para la manipulación y el control de robots que podrían reemplazar o asistir las actividades que realizan los seres humanos, especialmente en tareas consideradas “peligrosas”.
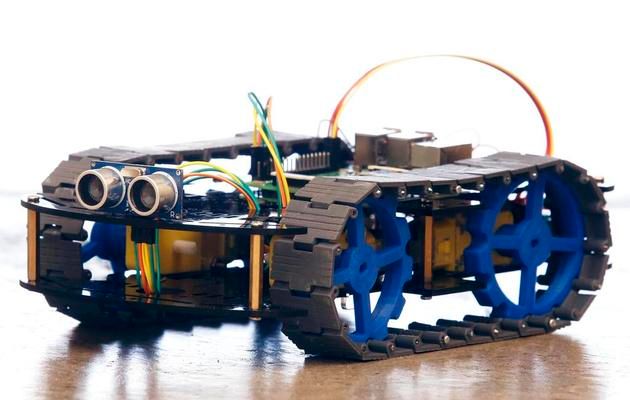
Uno de los prototipos es un robot de exploración (tipo oruga) diseñado para ser utilizado en actividades productivas de explotación minera que se realizan en el norte de nuestro país. El robot podría acceder a lugares inhóspitos para monitorear variables básicas en ambientes hostiles, como humedad del suelo, temperatura, presencia de gas metano y radioactividad, evadiendo los obstáculos que se presenten en el camino.
El prototipo es capaz de recolectar datos e imágenes de su entorno brindando información en tiempo real.
Se trata de una producción totalmente realizada desde la Facultad que combina un chasis convencional con orugas y ruedas, construidas a través de una impresora 3D, armada por un integrante del Instituto de Investigación en Informática (LIDI).
Martín Pi Puig, uno de los investigadores responsable del proyecto, explicó que “el robot explorador es adaptable a diferentes terrenos, y podrá ser manejado por un usuario –con un control remoto- que deberá encargarse de dirigirlo hacia un lugar específico en función de las necesidades requeridas”.
Además de la aplicación en excavaciones mineras, el robot podría adaptarse también para examinar zonas de deshielo donde un auto convencional no podría llegar por no poseer el agarre necesario. En este caso, podría censar temperatura bajo cero y densidad de la capa de nieve.
UN ROBOT TELEDIRIGIDO PARA LAS ZONAS DE ALTO RIESGO
En esta misma línea de investigación, otro equipo de estudiantes trabaja en el desarrollo de un robot teledirigido que también logrará acceder a diferentes zonas de alto riesgo para el monitoreo de otras actividades, por ejemplo, a un sistema de cañerías para censar el gas o la luminosidad, y a través de una cámara web detectar posibles obstrucciones y hasta eliminarlas.
Se trata de una modificación de un auto a radiocontrol, denominado Monster Pi, que se encontraba sin funcionar, al que se le incorporó una placa computadora. Gracias a la inclusión de este pequeño ordenador, se puede centralizar el control, en tiempo real, de múltiples funcionalidades que van desde la detección de objetos para el frenado automático, hasta el control de un sistema de luces instalado.
El desarrollo también permite el manejo del auto a distancia, usando un control especialmente diseñado para tal fin, desde el que se establece comunicación vía Wifi. Además del control de diseño propio, se adaptó un volante genérico -de los que se utiliza en plataformas de videojuegos- que se conecta a la placa de desarrollo que se encuentra monitoreando remotamente al auto y permite obtener una manipulación suave de la dirección del prototipo.
Al robot Monster Pi se le agregó una cámara de tipo webcam, controlada desde la placa de desarrollo, que permite monitorear el rumbo del auto a través del streaming de video en tiempo real. Por otra parte, el prototipo podrá tomar fotos automáticas al momento de detectar anomalías que sean importantes de informar.
Además, a través de diversos sensores, se monitorean variables como temperatura, humedad, luminosidad, proximidad o gas, mientras que también se generan diferentes respuestas a través de motores continuos, motores paso a paso, relé, leds y buzzers.
Juan Manuel Paniego, colaborador del proyecto, explicó que “la interconexión entre los diferentes subsistemas se realiza mediante WiFi, Bluetooth o Radio Frecuencia”.
Otro grupo de alumnos se encuentra desarrollando un prototipo de robot recolector de basura. “El objetivo de esta iniciativa es lograr un robot independiente que se mueva por un recorrido predeterminado, con diferentes puntos específicos donde debe realizar la acción de juntar la basura”, explicó el investigador Santiago Medina.